Dies ist eine alte Version des Dokuments!
Inhaltsverzeichnis
mC wökrshop
Wer macht mit
- sushi
- loon (Hat wer nen Leihduino???)
- Skruppy (Hat wer nen Leihduino???)
- wanda (…Boarduino + ein eHaserl…bringe beides mit)
- fred
Themen
- Tool chain
- I/O
- Timer
- Interrups
- HowTo RTFM
Vorbereitung
- Alles was AVR (8-Bit ATEML Microcontroller) mäsiges, wass schnell programmierbar ist (kein Bit-Banging oder so). Also E-Haserl, FooDoinos, Development boards, …
- Datenblatt von ATMEL über euren Chip herunterladen. Es sind i.d.R. PDFs mit mehr als 500 Seiten.
- Schaltpläne Pinouts suchen und mitnehmen, wenn nicht schon sauber aufgedruckt (ihr müsst halt wissen „Pin Nummer x geht auf diesen Kontakt“).
- Programmierkabel falls nötig.
- Breadboard, LED, Schalter, Jumper wires oder so, sinvoll für I/O.
Materialien
Das hier kann während des wörkshops mit Spickzetteln, Code sippets, Links, … gefüllt werden.
Hilfe
Löten iss sooo einfach
„Löten ist einfach! und so wirds gemacht“ (Comic): fullsoldercomic_de.pdf
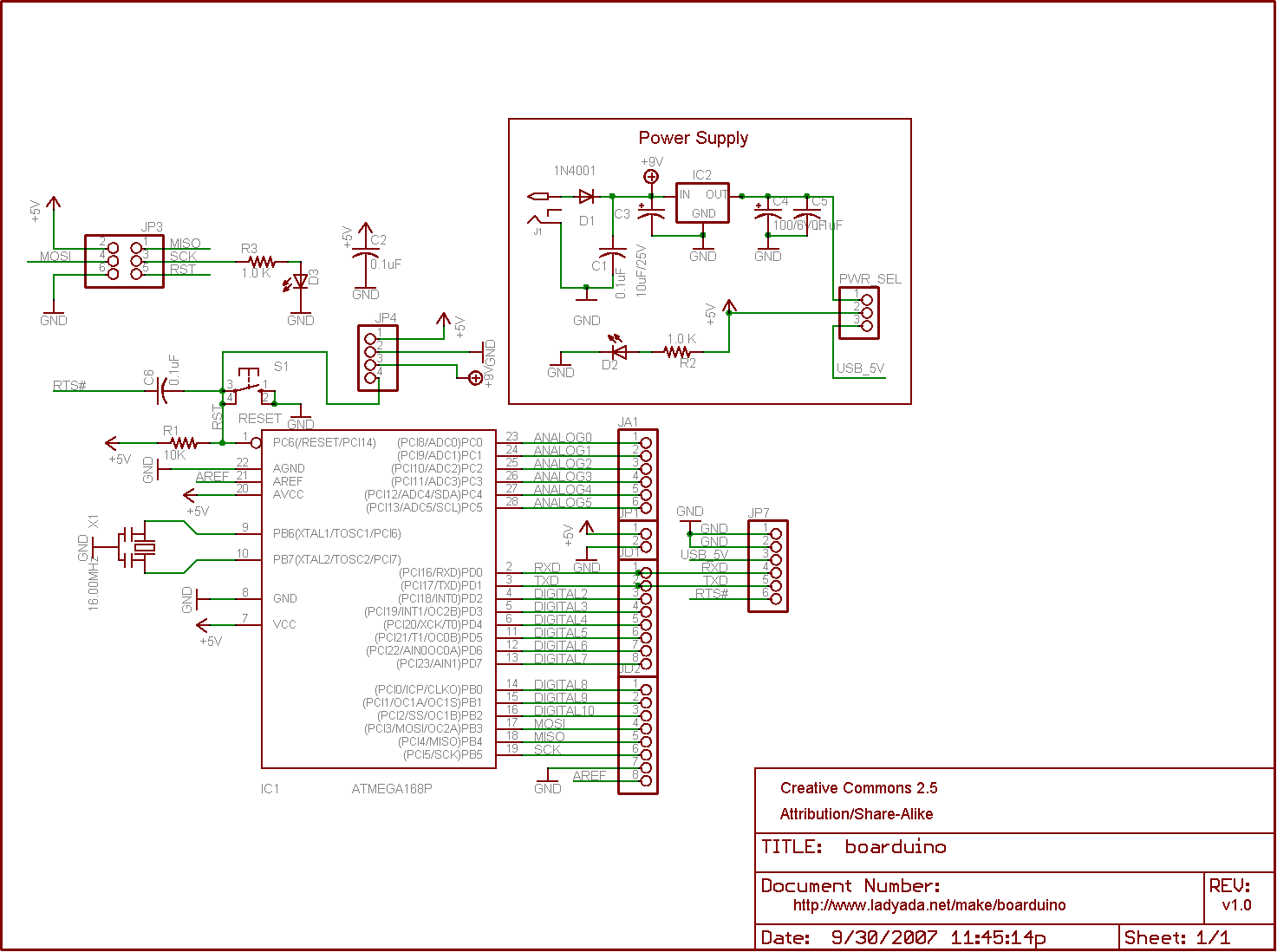
Boarduino
Infos: http://ladyada.net/make/boarduino/
Plan als .png: http://ladyada.net/images/boarduino/boarduinosch.png
Chipinfos:
unter: http://www.atmel.com/dyn/resources/prod_documents/doc8271.pdf
{kind=link}
- ATmega328P/ 16.00 MHz
- Flash (Kbytes): 32
- Pin Count: 32
- Max. Operating Frequency: 20
- CPU: 8-bit AVR
ehaserl
AVR
apt get install
- avrdude
- avr-libc
- gcc-avr
- binutils-avr (dasda eher nicht…was auch immer das ist
 )
)
Das müssten alle Pakete sein, die Fisch braucht.
Makefile für: ATmega1280
https://github.com/Skrupellos/Capacitive-touch-sensor/blob/master/Makefile
Vorsicht:
Für den ATmega328P (Boarduino) folgendes ändern:
MCU = atmega1280
ändern in:
MCU = atmega32
Code aus dem Wörkshop
#include <avr/io.h> // this contains all the IO port definitions #include <avr/interrupt.h> // definitions for interrupts #include <avr/sleep.h> // definitions for power-down modes #include <stdio.h> #include <stdbool.h> #include <util/delay.h>
int main() {
// 1111 1111
DDRA = 255;
DDRA = 0b11111111;
DDRA = 0xFF; // alles output
DDRA = _BV(PA0) | _BV(PA1) | _BV(PA2) | _BV(PA3) | _BV(PA4) | _BV(PA5) | _BV(PA6) | _BV(PA7); // Data direction register (1 = output / 0 = input)
DDRH = 0b00000000; // alles input
PORTH = 0b00000100; // Pull-up an
while(true) {
// 0000 0000
/*
PORTA = 0b00000001; // Erstes led an // Pegel definieren (1 = high / 0 low)
//PORTA = _BV(PA6) | _BV(PA4); // Pegel definieren (1 = high / 0 low)
_delay_ms(1000);
PORTA = PORTA | 0b00000010; // zweites led an
_delay_ms(1000);
PORTA = PORTA & ~0b00000001; // erstes LED aus
_delay_ms(1000);
PORTA = PORTA & 0b11111101; // zweites LED aus
_delay_ms(1000);
*/
if(PINH & 0b00000100){
PORTA = PORTA & ~0b00000001;
}else{
PORTA = PORTA | 0b00000001;
}
}
// 0000 0001 = 1 = 1 << 0 = _BV(0) = _BV(PA0)
// 0000 0100 = 4 = 1 << 2 = _BV(2) = _BV(PA2)
// ==========================================
// 0000 0101 = 1 | 4 = 5
// BINÄÄÄRES ORDER
// 0001 0101 = 21
// 1000 0110 = 134
// ===============
// 1001 0111 = 155
//
}